Published On Jun 18, 2018
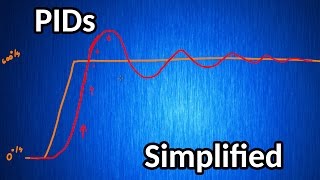
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models.
- Download Code Examples to Learn How to Automatically Tune PID Controller Gainshttps: http://bit.ly/2HKBh12
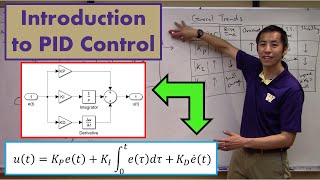
Noise is generated by sensors and is present in every system. The derivative in an ideal PID controller amplifies high-frequency noise. Even if that noise is relatively low amplitude, the derivative will sense it and possibly amplify it enough to impact the controller. To protect against high-frequency noise impacting the system, you can modify the derivative path with a low pass filter to reduce the noise before it causes any problems.
PID Control with MATLAB and Simulink: http://bit.ly/2Qg57y8
PID Control Made Easy: http://bit.ly/2Q7Hhor
PID documentation: http://bit.ly/2Qi4fcE
Watch more MATLAB Tech Talks: http://bit.ly/2rTc8Yp
Check out more control system lectures on Brian's Channel: http://bit.ly/2IUlvkw
Get a free MATLAB Trial: https://goo.gl/ZHFb5u
Learn more about MATLAB: https://goo.gl/8QV7ZZ
Learn more about Simulink: https://goo.gl/nqnbLe
See What's new in MATLAB and Simulink: https://goo.gl/pgGtod
© 2018 The MathWorks, Inc. MATLAB and Simulink are registered
trademarks of The MathWorks, Inc.
See www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand names maybe trademarks or registered trademarks of their respective holders.