Published On Dec 7, 2015
For more information, see http://nu32.org. This video is a supplement to the book "Embedded Computing and Mechatronics with the PIC32 Microcontroller," Lynch, Marchuk, and Elwin. It is part of Northwestern University's ME 333 Introduction to Mechatronics.
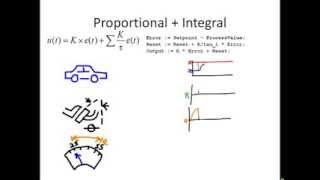
L-comp: Explain why you have to be careful not to make the integral gain Ki too large.
show more