Published On Premiered Apr 19, 2023
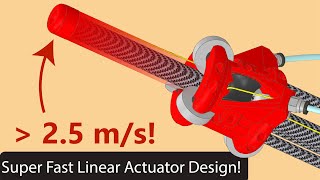
We build and test a powerful robotic actuator based on a ballscrew, a brushless motor, an ODrive board and a magnetic encoder
show more
We build and test a powerful robotic actuator based on a ballscrew, a brushless motor, an ODrive board and a magnetic encoder