Published On May 31, 2023
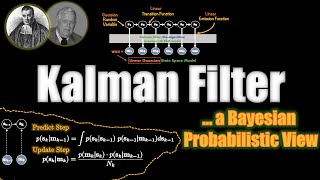
Attitude estimation from Kalman filter using sensor fusion via data from a gyroscope and accelerometer, providing angular velocity and a reference direction (direction of gravity), respectively. In the third of my three-part series, we first go over a MATLAB example of estimating position and velocity from noisy position data (altitude from sonar). We compare the estimated velocity with that from a finite-difference estimate and find the Kalman filter's is much smoother.
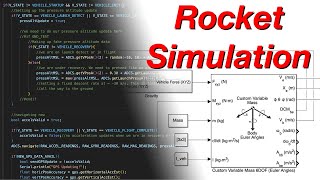
Finally, we discuss the problem of estimating attitude, and formulating the system model. We find that 3-2-1 Euler angles (yaw, pitch, and roll) are not a good state variable x as their evolution equation is not linear in x. However, quaternions q (i.e., Euler parameters ß) are a good attitude representation because their kinematic dynamical equation is linear. A gyroscope provides the angular velocity, ω, as measured in the body-fixed frame for a vehicle, spacecraft, or aircraft. Combining ω with a reference direction g that provides roll and pitch, we demonstrate the use of sensor fusion (from a gyroscope and accelerometer, respectively).
For both examples, construct a system model via the state transition matrix A, the state-to-measurement matrix H, and estimate the process noise and measurement noise matrices, Q and R.
💻 Get the MATLAB Code https://tinyurl.com/kalmanfilterforbe...
This special lecture series takes us into dynamic attitude estimation, using time-varying gyroscope data, as opposed to the previously covered static attitude estimation, which uses simultaneous measurements of known external objects.
Attitude Determination And Control System (ADCS)
► Next: Moment of Inertia Matrix & Principal Axis Frame | MATLAB Example Calculation
• Moment of Inertia Matrix & Principal ...
► Previous, Kalman Filter for Beginners, Part 2 - Estimation and Prediction Process & MATLAB Example
• Kalman Filter for Beginners, Part 2 ...
► More lectures posted regularly
Be informed, subscribe https://is.gd/RossLabSubscribe
► Prof. Shane Ross 🌠 aerospace engineering professor, Virginia Tech
Background: Caltech PhD | worked at NASA/JPL & Boeing
Research website for @ProfessorRoss
http://shaneross.com
► Follow me
/ rossdynamicslab
► Space Vehicle Dynamics course videos (playlist)
https://is.gd/SpaceVehicleDynamics
► Lecture notes for Kalman Filter series (PDF)
https://tinyurl.com/kalmanfilterforbe...
► MATLAB Code
https://tinyurl.com/kalmanfilterforbe...
► Reference
Kalman Filter for Beginners: with MATLAB Examples
by Phil Kim (Author), Lynn Huh (Translator), 2010
https://www.amazon.com/dp/1463648359
► Inertial Measurement Unit Used (IMU Sensor)
WIT Motion, Gyroscope + Accelerometer + Magnetometer
https://www.wit-motion.com/gyroscope-...
► Chapters
0:00 Estimating Velocity From Position using Kalman Filter
5:08 Comparison with Finite Differences Approximation for Velocity
9:00 Dynamic Attitude Determination
9:53 WIT Motion Sensor
12:16 Integrating Gyroscope Angular Velocities from Sensor, MATLAB
18:00 Kalman Filter using Yaw, Pitch, Roll Euler Angles
20:30 Kalman Filter using Quaternions (Euler Parameters)
26:16 MATLAB Demo Using Quaternions
30:00 Data Fusion - Accelerometer with Gyroscope
39:01 Sensor Data Fusion Recap
► Courses & Playlists by Dr. Ross
📚Space Vehicle Dynamics
https://is.gd/SpaceVehicleDynamics
📚3-Body Problem Orbital Dynamics Course
https://is.gd/3BodyProblem
📚Space Manifolds
https://is.gd/SpaceManifolds
📚Lagrangian and 3D Rigid Body Dynamics
https://is.gd/AnalyticalDynamics
📚Nonlinear Dynamics and Chaos
https://is.gd/NonlinearDynamics
📚Hamiltonian Dynamics
https://is.gd/AdvancedDynamics
📚Center Manifolds, Normal Forms, and Bifurcations
https://is.gd/CenterManifolds
Implement a Kalman filter for dummies Visually Explained tutorial MATLAB aerospace mathematics recursion orbital physics chaos unstable Caltech JPL Lyapunov Celestial Mechanics Hamiltonian Jet Propulsion Lab Centaurs
#kalmanfilter #MATLAB #aerospace #attitude #attitudeestimation #sensorfusion #mathematics #recursion #orbitalmechanics #threebodyproblem #LagrangePoint #space #CR3BP #3body #3bodyproblem #SpaceManifolds #JamesWebb #NonlinearDynamics #gravity #SpaceTravel #SpaceManifold #DynamicalSystems #JamesWebbSpaceTelescope #space #solarSystem #NASA #dynamics #celestial #SpaceSuperhighway #InterplanetarySuperhighway #spaceHighway #spaceHighway #gravitational #mathematics #dynamicalAstronomy #astronomy #wormhole #physics #chaos #unstable #PeriodicOrbits #SaddlePoint #CriticalPoint #Halo #HaloOrbit #LibrationPoint #LagrangianPoint #LowEnergy #VirginiaTech #Caltech #JPL #LyapunovOrbit #CelestialMechanics #HamiltonianDynamics #planets #moons #multibody #GatewayStation #LunarGateway #L1gateway #ArchesOfChaos #cislunar #cislunarspace #orbitalDynamics #orbitalMechanics #celestialChaos #Chaotician #Boeing #JetPropulsionLab #Centaurs